
 产品:20
产品:20
 联系我们
联系我们

串联和并联机器人
串联机器人其串联式结构是一个开放的运动链,其所有运动杆并没有形成一个封闭的结构链。串联机器人的工作空间大,运动分析比较容易可以避免驱动轴之间的耦合效应。但其机构各轴必须要独立控制,并且需要搭配编码器和传感器来提高机构运动时的精准度。
串联机器人其串联式结构是一个开放的运动链,其所有运动杆并没有形成一个封闭的结构链。串联机器人的工作空间大,运动分析比较容易可以避免驱动轴之间的耦合效应。但其机构各轴必须要独立控制,并且需要搭配编码器和传感器来提高机构运动时的精准度。

而并联机器人和传统工业用串联机器人在应用上构成互补关系,它是一个封闭的运动链。并联机器人不易产生动态误差,无误差积累精度较高。另外其结构紧凑稳定,输出轴大部分承受轴向力,机器刚性高,承载能力大。但是,并联机器人在位置求解上正解比较困难,而反解容易。
2自由度并联机器人
3自由度并联机器人

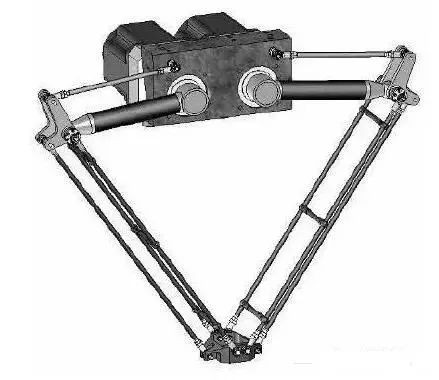
3自由度并联机构种类较多,形式较复杂,一般有以下形式:平面3自由度并联机构,如3-RRR机构,它们具有2个移动和一个转动;球面3自由度并联机构,如3-UPS-1-S球面机构,该类机构的运动学正反解都很简单,是一种应用很广泛的3维移动空间机构;空间3自由度并联机构,如Delta并联机器人,这类机构属于欠秩机构,在工作空间内不同的点其运动形式不同是其最显著的特点。还有一类是增加辅助杆件和运动副的空间机构。
4自由度并联机器人


6自由度并联机器人

6自由度并联机构是并联机器人机构中的一大类,是国内外学者研究得最多的并联机构,广泛应用在飞行模拟器、6维力与力矩传感器和并联机床等领域。但这类机构有很多关键性技术没有或没有完全得到解决,比如其运动学正解、动力学模型的建立以及并联机床的精度标定等。
- 下一篇:日本工业机器人订单减少 下半年发展情况还未可知
- 上一篇:工业机器人有哪四大类?